 |
(495)510-98-15
|
|
Меню
|
Главная » Электроприводы с питанием 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 [ 35 ] 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 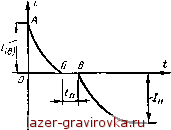 Рис. 5.22. Я. Этот ток такт которого будет теперь при наличии тока в нагрузке оставаться в положении Я независимо от значения и полярности сигнала управления. На рнс. 5.22 показан процесс реверса тока в нагрузке при раздельном управлении. Вначале работала группа В, ток в нагрузке /(В> был равен току группы В. В момент времени £=0 дана команда на реверсирование тока. На участке АБ ток в группе В спадает до нуля. В точке Б датчик тока дает сигнал на замыкание контакта реле РТ, что приведет к переключению реле РП, снятию импульсов с вентилей группы В и разрешению подачи импульсов на вентили группы Я. Однако, как уже говорилось, разрешение на работу группе Я будет даио через некоторое время. Это время на рис. 5.22 обозначено tn (отрезок БВ). Лишь после точки В начнет нарастатьток в группе будет равен току и нагрузке 7(Н). Как видно из рис. 5.22, прн раздельном управлении в кривой тока нагрузки появляется бестоковая пауза ta-Она увеличивает время переходных процессов, что является недостатком раздельного управления реверсивным преобразователем. Современные устройства позволяют иметь бестоковую паузу не более 5-10 мс, что в большинстве случаев является вполне допустимым, поэтому реверсивные преобразователи с раздельным управлением находят все большее применение. Отметим, что для электроприводов с нереверсивными преобразователями и реверсором (§ 4,1) системы управления переключением реверсора строятся аналогично с применением ЛПУ. Прн этом обеспечивается бестоковое переключение реверсора. Однако для контактного реверсора существенно большим будет время переключения. 5.5. ЭЛЕКТРОПРИВОДЫ С ПИТАНИЕМ ЯКОРЯ ДВИГАТЕЛЯ ОТ РЕВЕРСИВНОГО ВЕНТИЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ Схема электропривода с двигателем постоянного тока независимого возбуждения, обмотка якоря которого питается от реверсивного тиристорного преобразователя, приведена на рнс. 5.23. В данном случае принято, что преобразователь выполнен по трехфазной мостовой схеме выпрямления со встречно-параллельным соединением вентильных групп. Разумеется, что для питаиня якоря двигателя могут быть использованы и многие другие, рассмотренные ранее схемы. Прн совместном управлении группами, как уже указывалось в § 5.2, необходимо включение реакторов для ограничения уравнительного тока. В рассматриваемой схеме принято, что реакторы ие насыщаются рабочим током, поэтому их два. Эти же реакторы поочередно в зависимо- 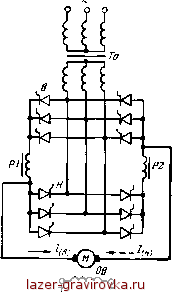 Р1 -- !(в) Е И Рнс 5.23. Рис 524. стн от направления тока в якорной цепн выполняют роль сглаживающего реактора. В случае раздельного управления группами уравнительные реакторы из схемы исключаются, а прн необходимости иметь сглаживающий реактор, он включается последовательно с якорем двигателя. При направлении тока в якорной цепи двигателя, показанном на рнс. 5.23 стрелкой 7(В), рабочий ток проходит через группу В. При этом независимо от направления вращения двигателя знак момента, развиваемого двигателем, остается одним н тем же, так как момент определяется магнитным потоком, постоянным в данном случае, й током якорной цепи. При противоположном направлении тока, показанном на рис. 5.23 стрелкой 7(н), ток проходит через группу Я. В этом случае двигатель развивает момент обратного знака. Механические характеристики двигателя при питании его якоря от реверсивного преобразователя существенно зависят от способа управления вентильными группами. Рассмотрим вначале механические характеристики двигателя при согласованном управлении, когда соотношение углов регулирования групп В и Я устанавливается в соответствии с условием (5.4). При этом будем считать, что падение напряжения на вентилях равно нулю, а суммарное сопротивление Rq якорной цепи вместе с преобразователем остается неизменным. Магнитный поток двигателя равен номинальному потоку Фн. На рис. 5.24 приведена эквивалентная схема электропривода для случая, когда группа В работает в выпрямительном режиме с э. д. с. EBt группа Я -в инвертор-ном с э. д. с. Ей, э. д. с. двигателя равна Е, Прн работе группы В в выпрямительном режиме рабочий ток / протекает через группу В и якорь двигателя за счет разности Еъ-Е и в установившемся режиме равен: / (£.-£)/* , (5.6) где Ев = Ed0 cos ав; Е = кФн со. Подставив значения Ев и Е в (5.6), после преобразований получим уравнение электромеханической характеристики двигателя: <о = (Edu cos ссв - Я?0)/(£ФН). (5.7) При сев-const уравнение (5.7) представляет собой уравнение прямой лиинн, проходящей через точку соов = =£docos в/(&Фи) иа осн ординат (оси скорости) и точку 7=£docosав/Яо на оси абсцисс (осн тока). Наклон прямой определится сопротивлением Ro. При работе группы Я в ннверторном режиме ток в якоре двигателя изменяет свой знак на противоположный, а направления вращения двигателя н его э. д. с. остаются неизменными, В этом случае Е>Еа> ток в якорной цепи протекает за счет разности Е-£и и в установившемся режиме равен I=-(E-Ea)/R0, (5.8) где £ = CcosOh. |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |