 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 [ 9 ] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 фициента передачи тока базы; /тах - допустимый ток транзистора; - кратность тока базы. Обычно выбирают s[ = 1,2 ... 1,5, что позволяет наряду о уменьшением потерь в транзисторе сохранить достаточно высокий коэффициент усиления по мощности. Разлагая логарифмические функции в выражениях (3.27) в степенной ряд и ограничиваясь первыми его членами, запишем Поскольку maxsl / S max4I / = v<o6aa/(2n); s[ = /6p, ii где р^ -коэффициент усиления транзистора по току то вьта. жение для расчета динамических потерь в транзисторах комму. 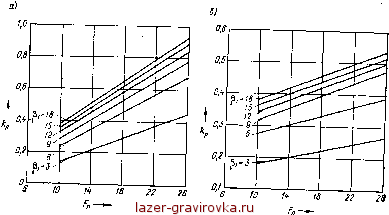 Рис. 3.9. К определению динамических потерь в коммутаторе ТцааТх0РпариметФвид ° Ф°РМуЛ (!Ш> В ° ительных едини- n+F где fg = собазтр/(2я); 1б = 1б/1баз; /б -ток базы транзистора. Отношение ?р/(/бр\) зависит от типа применяемых силовых транзисторов, поэтому для определения характера изменения динамических потерь в функции Pi и fn рассмотрим зависимость коэффициента в соответствующем диапазоне изменения указанных параметров* , 50 На рис. 3.9 приведены кривые зависимостей kp(F ) для синусоидального (а) и трапецеидального (б) законов позиционной модуляции при относительной частоте вращения v = 0,7. Зависимость kp(Fn) для обоих случаев практически линейна. Рост коэффициента kp с увеличением р\ объясняется увеличением пульсаций тока и соответствующим изменением значения тока в моменты коммутации транзисторов. Как показали расчеты, при трапецеидальной позиционной модуляции потери на переключения в 1,1-2 раза меньше, чем при синусоидальной, в зависимости от частоты вращения и параметра Pi, причем большее значение соответствует меньшей относительной частоте вращения. Различие в величине динамических потерь может привести к уравниванию энергетических показателей ВДПМ при работе на естественной механической характеристике для рассматриваемых законов позиционной модуляции. Меньший уровень динамических потерь при трапецеидальном законе для Q = 1 объясняется наличием горизонтального участка в трапецеидальном сигнале, на протяжении которого ya = 1 и силовые транзисторы не коммутируются в пределах интервала [at, я - at] в электрических радианах. При уменьшении управляющего сигнала (Q < 1) имеет место выравнивание коэффициентов kp для синусоидального и трапецеидального законов позиционной модуляции. Таким образом, с точки зрения динамических потерь для управляемых ВДПМ оба закона позиционной модуляции идентичны. 3.6. Пульсации частоты вращения вала ВДПМ Принципиально электромагнитный момент ВДПМ с синусоидальной позиционной модуляцией постоянен в пределах одного оборота вала двигателя. Тем не менее, временные задержки при коммутации силовых транзисторов мостовых усилителей мощности, которые вводятся с целью исключения сквозных токов, вносят искажения формы фазного тока. Эти искажения особенно заметны при сигналах управления Q < 0,3, когда минимальная длительность управляющего импульса соизмерима с временем задержки t3, и обусловлены уменьшением на величину г3 длительности импульсов напряжения ШИМ, формируемого на обмотках двигателя. При малых Q в окрестностях точек перехода сигнала с ДПР через нуль происходит пропадание импульсов питающего напряжения, длительность которых меньше или равна времени задержки, что приводит, во-первых, к уменьшению амплитуды основной гармоники напряжения питания обмоток двигателя и, во-вторых, к изменению гармонического состава напряжения ШИМ и, следовательно, к появлению высших гармоник тока и пульсациям электромагнитного момента и мгновенной частоты вращения вала. Пульсации электромагнитного момента могут быть вызваны также отклонением закона позиционной модуляции от синусоидального при применении в качестве ДПР, например, датчиков Холла, выходной сигнал которых в функции угла поворота ротора в общем случае несинусоидальный. Рассмотрим влияние формы выходного сигнала ДПР и величины временных задержек на пульсации электромагнитного момента и частоты вращения вала ВДПМ, ограничившись случаем синусоидального сигнала и трапецеидального с длиной линейно возрастающего (убы- вающето) участка я/3 в электрических радианах (как наилучшим образом приближенного к синусу). В дополнение к допущениям, принятым выше, при оценке влияния временных задержек на работу двигателя примем следующие: воздушный зазор машины гладкий, а поле в воздушном зазоре от МДС обмоток определяется спектром токов, протекае-мых в них; влиянием ЭДС, наводимой в обмотках двигателя при качании вала, пренебрегаем. Последнее допущение дает возможность использовать принцип суперпозиции при нахождении переменной составляющей электромагнитного момента. Фазный ток в двигателе в общем виде можно представить следующим образом: i= £ /п sin (tjco + где 1ц, фп - амплитуда и фаза ri-й гармоники, которые определяются путем разложения в ряд Фурье кривой тока в двигателе, рассчитанной по формулам § 3.4. Первая гармоника тока /1 sin(cor + фО создает вращающий момент Мэм, неизменный в пределах одного оборота вала. Остальные гармоники тока обусловливают появление переменной составляющей электромагнитного момента h.M{t). Рабочие участки механической характеристики ВДПМ линейны в ограниченных пределах изменения переменной составляющей ДМ (г), поэтому уравнения для момента ВДПМ и угловой частоты вращения в общем виде будут иметь аналогичную структуру: М(0 = МЭ1)-Ь ДМ(0; £2(0 = й + Дй(0- Так как в квазиустановившемся режиме составляющая момента Мэм уравновешивается моментом нагрузки, то уравнение динамики примет вид m(t) = J~, (3.28) где / - момент инерции ротора и связанных с ним элементов нагрузки. Для вывода зависимости ДМ = f(i) воспользуемся методом двух реакций и перейдем от действительных токов в фазах двигателя к токам в осях d и q [26]: а о d Г idr\ 1 d Г cos + е) ~~ sin (ш' + 9) 1 Ч L iqr) J q L sin (at + 9) cos (at + 9) J X Фп)-1 iqr) J q L sin (at + 9) cos (at + 9) а г 1Ц sin (v\at + фч) bl(- 1) 2 1 cos (r\a>t + фл откуда найдем i f-VosfOi+iJw + PTi + e]. 4 = 3,7,11,...; lqr* \ 11 cos [(/ - 1) at + - 9], / = т) = 5, 9, 13, ... Выражение для AM(t) примет вид АЛ1 (0 =-g- Я - £ /чсоз[(г|+ 1)0 + 4 + 9] + + Y. hcos[(l-\)at + Щ-В) Т]=5 Проведя тождественные преобразования и обозначив Ае = Ф\ + 7 ~ 2Vi cos (фч ~Ь + 26). где TIJlf /; = /г [, получим ДЛ1 (t) = - Eli Yj cos (£ш ~ 4s>- f3-29) Здесь g = (л +0/2; In sin (Фп + 9) - Ii sin (фг - 9) ф„ = arctg =-=-. h cos (фг - 9) - /ч cos (ф^ 4- 9) Решая уравнение (3.28) с учетом (3.29), найдем 7 °° АЙ (t) = T3Jtpg Z As sin - <pg), Где /1 = /, баз; 7эм = о/Лтбаз- Поскольку ГЭм зависит от момента инерции вращающихся масс и является характеристикой динамических свойств ВДПМ, то для оценки амплитуды пульсаций мгновенной частоты вращения вала двигателя примем величину Ла = AgJ{j(vg). Как показали расчеты, величина Ag при £Г^8 на порядок меньше Ag при g = 4. Поэтому ограничимся рассмотрением третьей и пятой гармоник тока, т.е. положим g =4. В пусковом режиме при 6 = 0 в случае равенства амплитуд третьей и пятой гармоник тока пульсаций электромагнитного момента в пределах одного оборота с четырехкратной частотой не будет. Но при вращении вала в результате появления фазового сдвига между гармониками тока величина А$ становится отличной от нуля, и в двигателе возникают пульсации мгновенной частоты вращения. Поэтому формирование тока в обмотке двигателя исходя из условия взаимной компенсации высших гармоник, и в частности третьей и пятой, при v = 0 может быть рекомендовано лишь для ВДПМ, работающих в пусковом режиме. 0.012 0.010 0,008 0,00$ т. е. для моментных двигателей. Расчеты, проведенные с использованием полученных выражений, показали, что для синусоидального закона позиционной модуляции зависимость Лд(Гз) практически линейна. Здесь 73 - отношение времени задержки к периоду частоты коммутации ШИМ. С увеличением частоты вращения и сигнала управления Q влияние временных задержек на величину Ай уменьшается и при v Qvn; Q > 0,3 может не учитываться. На рис. 3.10 приведены кривые зависимостей ДЪ(ГЭ) для 0 = 0 и Q = QN (обозначено штриховыми линиями) при Pi =3; v = 0,\vN; Q = 0,1, откуда видно, что уровень пульсаций частоты вращения при 0 = 0 ниже, чем при 9 ф 0. Кроме того, увеличение 13 приводит к потере преимуществ синусоидальной позиционной модуляции. Поэтому при выборе частоты коммутации ШИМ необходимо обеспечить условие ?3 < 0,01...0,02. В противном случае целесообразно предусмотреть регулирование частоты коммутации в сторону ее уменьшения при малых сигналах управления и режимах работы ВДПМ, близких к пусковому. 0,004 0,002
0,004 0,00$ 0,012 0016 Рис. 3.10. К определению пульсаций частоты вращения вала при синусоидальной (1) и трапецеидальной (2) позиционной модуляции Глава 4 ВЕНТИЛЬНЫЕ ДВИГАТЕЛИ С МЕХАНИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ, БЛИЗКИМИ К ХАРАКТЕРИСТИКАМ РАВНОЙ МОЩНОСТИ 4.1. ВД с механическими характеристиками равной мощности - средство повышения энергетических показателей робототехнических систем К энергетическим показателям электроприводов роботов предъявляются жесткие требования, что обусловлено, в частности, большой стоимостью и дефицитом электроэнергии автономных источников ограниченной мощности. Если в приводах, работающих при изменении нагрузки в широких пределах, используются обычные вентильные электродвигатели с линейными ме- ханическими характеристиками, то потребляемая ими энергия будет значительно превышать номинальную энергию, соответствующую номинальной нагрузке двигателя. Указанное обусловлено тем, что в двигателе с линейной механической характеристикой ток /, а следовательно, и мощность Р, потребляемые от источника питания в установившемся режиме работы, пропорциональны моменту сопротивления нагрузки Мс, а именно / = Л1С/(СМФ); Р = W (U - напряжение питания двигателя; С„ - конструктивный коэффициент электрической машины). По указанным причинам в электроприводах целесообразной механической характеристикой ВД является механическая характеристика равной мощности. Применение ВД с такой характеристикой не только обеспечивает существенную экономию электроэнергии источника ограниченной мощности, если двигатель работает при изменении момента нагрузки в широких пределах, но также позволяет увеличить быстродействие и надежность приводов. В щеточно-коллекторных ДПТ с электромагнитным возбуждением вид механической характеристики можно изменять путем изменения магнитного потока, воздействуя на ток возбуждения. Так как в ВД индуктор представляет собой постоянный магнит, то изменять его поток в широких пределах в настоящее время не представляется возможным. Рассмотрим методы получения в ВД механических характеристик, близких по виду к характеристикам равной мощности. 4.2. ВД с изменяемой структурой энергопреобразующего узла Анализ зависимости механических свойств ВД с последовательным и параллельным подключением секций [4] от угла сигнального сектора рс ДПР и формы ЭДС в секциях показывает, что одним из рациональных способов получения в них механической характеристики, близкой по виду к линии равной мощности, является автоматическое изменение их структуры по сигналу управления, зависящему от угла поворота ротора, частоты вращения или от потребляемого тока, т. е. автоматическое переключение секций якорной обмотки с последовательного соединения на параллельное и наоборот. На рис. 4.1 представлена электрическая схема ВД, изменение структуры которого осуществляется с помощью переключателя, состоящего из транзисторов VT5, VT6 и полупроводникового диода VD1 [27]. Якорная обмотка двигателя состоит из четырех секций LI - L4, каждая из которых сдвинута относительно друг друга на 90° эл. Секции в каждой паре LI, L2 и L3, L4, смещенные между собой в якоре на 180° эл., соединены с коллекторами соответствующих силовых транзисторов VT1 - VT4 коммутатора и последовательно через диод VD1 подключены к зажимам источника питания. Транзистор VT5 типа NPN соединен с анодом диода VD1 и отрицательным зажимом источника питания, а транзистор VT6 типа PNP - с катодом диода VD1 и положительным зажимом источника. Из схемы видно, что при выключенных транзисторах VT5 н VT6 секции попарно через диод VD1 и транзисторы VT1-VT4 коммутатора соединены между собой последовательно, а приложенное к якорной обмотке напряжение U уравновешивается |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |