 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 [ 7 ] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 Анализ влияния параметров на вид механической характеристики ВДПМ удобно вести в относительных единицах, приняв за базовые следующие величины: Uua3 - амплитудное значение первой гармоники фазного напряжения, формируемого преобразователем при максимальном сигнале управления, которое равно постоянному напряжению источника; гйаз - активное сопротивление фазы двигателя; Ибаз- угловая частота ЭДС вращения при идеальном холостом ходе двигателя и 9 = 0; /баз = Убаз/баз - базовый ток, равный ПУСКОВОМУ; Рбаз = /базСДаз - базовая МОЩНОСТЬ; /Ибаз = рЯбаз/Шбаз - баЗО- вый момент. Переходя к относительным единицам в формулах (3.1) -(3.3), (3.6), получим выражения для расчета характеристик ВДПМ: = Q У1 + (ухг)2 cos (8 + ф) - у ) у [Q У1 + (УХГ)2 COS (8 + ф) - у ЭМ 1 + (У*г)2 . Q У1 + (у*/-)2 cos (8 + ф) - у * 1 + ( г)2 ; v2xr - Q У1 + {yxr)2 sin (8 + ф) 1 + (yxr)2 (3.7) где у = и/Ибаз; Q= С С7баз - коэффициент сигнала управления; \x = MjM3\ хг = Шбаз£./гбаз - относительное индуктивное сопротивление обмотки фазы двигателя. Полагая р. = 0 и Q = 1, найдем из выражений (3.7) частоту вращения в режиме идеального холостого хода и относительный пусковой момент двигателя: О cos 6 v°= i+sine; = Qcose- (з-8) Отсюда следует, что при наличии угла сдвига осей обмоток ДПР относительно осей обмоток двигателя (6 < 0) частота вращения в режиме холостого хода возрастает, в то время как пусковой момент уменьшается. Выражения для расчета тока ВДПМ подобны соответствующим расчетным выражениям для синхронного электродвигателя. Тем не менее необходимо указать на принципиальное отличие между этими двигателями. Для ВДПМ не существует понятия перегрузочной способности. Угол 0 в ВДПМ определяется лишь установкой ДПР и не изменяется при изменении нагрузки на валу, в то время как в синхронных двигателях угол между вектором ЭДС, наводимой магнитным потоком по продольной оси, и вектором напряжения (угол 0) растет до определенного значения с увеличением момента на валу при сохранении синхронной частоты вращения. В ВДПМ, как и в других вентильных двигателях постоянного тока, с увеличением нагрузки частота вращения вала уменьшается. Механические характеристики ВДПМ аналогичны характеристикам обычного исполнительного двигателя постоянного тока с независимым возбуждением при якорном управлении, хотя наличие индуктивности обмоток сказывается на их линейности. При L = 0 механическая характеристика ВДПМ линейна (полагаем 9 = 0 - реверсивный ВДПМ) и описывается следующим выражением: =o = Q-v- (3-9) Нелинейность, вносимую влиянием индуктивности обмоток, оценим как отношение где цп = Q - относительный пусковой момент ВДПМ при 0 = 0. С учетом выражений (3.9) и (3.7) получим я= (З.ю) Q[i + (y*r)2] v Анализ этого выражения показывает, что с увеличением параметра х, степень нелинейности механической характеристики ВДПМ растет, а максимальные значения % соответствуют относительной частоте вращения v = 0,5 ... 0,6. Выражение (3.10) позволяет при расчете ВДПМ выбирать параметры обмоток двигателя с учетом заданной степени нелинейности механической характеристики. 3.3. Особенности совместной работы двигателя и усилителя в классе Д Силовая часть каждой из фаз коммутатора ВДПМ выполнена по мостовой схеме. Обратные диоды мостовой схемы, подключаемые параллельно силовым транзисторам, позволяют исключить перенапряжения на транзисторах в моменты коммутации и одновременно выполняют роль диодов рекуперации. Обмотка фазы двигателя включена в диагональ моста. Если ЭДС вращения превышает постоянное напряжение источника питания, ток начинает протекать от двигателя к источнику через обратные /*к диоды. Из выражения (3.8) следует, \ о что при наличии угла 0 относительная частота вращения в режиме холостого хода становится больше единицы. Поэтому при v > 1 будет происходить процесс рекуперативного подтормаживания в те моменты, когда Е > U. На рис. 3.4 интервалам времени, в течение которых имеет место указанный режим, соответствуют заштрихованные участки. По обмоткам двигателя одновременно с током (3), формируемым напряжением (2) и ЭДС вращения (4), проте- 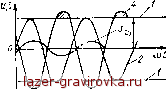 Рис. 3.4. К пояснению работы ВДПМ на частотах вращения выше частоты вращения в режиме холостого хода 1 - напряжение питания; 2 - иа пряжение, формируемое на обмотке фазы ВДПМ; 3 - ток в фазе; 4 - ЭДС вращения кает ток, создающий тормозной электромагнитный момент Этот ток можно рассчитать, используя принцип наложения и полагая Zr °L°бЛусловлен напряжением 3, вид которого показан на рис. 6А. Аналитически такое напряжение представляется как срезанная синусоида в виде суммы двух функций [18]: где У 2 = О з = У\ + г/г, лТв (3.11) -) при при 2 - ±Tk <t <Т~-° £(cosi + cos-) при 0 при * = 0, 1, 2, Т0 ЗГ - Г0 -arccos-; Т = 2я/а>. ЙН КЦШ И У2 четные- поэтому в их разложении в ряд Фурье будут отсутствовать синусоидальные члены: 1 °° =у% + Z % cos rjco/; J 11= 1 I где sin (г) - 1) </2=-т + 2] ап cos f\(ot, (3.12) !) sin (т) + 1) . лТа --2 cos -~--- т С учетом выражений (3.12) запишем з = 2 X! c°s т]со/. (3.13) Так как функция з четная и обладает симметрией третьего рода, т. е. и3(/ + Г/2) =-u3(t), то в разложении (3.13) будут отсутствовать четные гармоники. Полагая в формуле (3.5) U = 0; Е = 2ац; х = tjcoL, запишем выражение для тока рекуперации / = 2ач 11 У г2 + (riw)2 В результате взаимодействия тока 1 с полем постоянного магнита индуктора в двигателе возникает электромагнитный мо- мент, причем среднее за один оборот значение момента будет отлично от нуля лишь при взаимодействии первой гармоники тока рекуперации с полем постоянного магнита. Поэтому выражение для тормозного момента в двигателе с учетом (3.3) примет вид 2га ,Е Мт= - где со r2 + (coL)2 sin 2яТ0/Т 1- Т К1 2лТ0/Т Окончательно выражение для электромагнитного момента ВДПМ примет вид р и уУ2 + х* cos (9 + Ф) - Ег М = Е г2 + х2 со со, рек> r2+ (coL)2 СО > СО рек> где Шрек - угловая частота, при которой U = Е. В относительных единицах 1Л где Q Vl + (vxr)2 cos (8 + ф) - v 1 + (vxr)2 - \ 2va, К 1 + ЫгУ = *i-(l - л \ v< 1, Г v > 1, с. =- sin 2с\ 2с, 2 arcsin 1/v - 02 0,6 0,8 U° Рис. 3.5. Механические характеристики ВДПМ / - без учета генераторного момента; 2 - рассчитанная по формуле (3.14); 3 - снятая экспериментально На рис. 3.5 построены механические характеристики ВДПМ при Э = -30° эл. Хорошее совпадение кривых и 3 свидетельствует о справедливости полученных выражений. 3.4. ВДПМ как импульсная система Рассмотрение ВДПМ как обобщенной электрической машины позволяет получить выражения для рабочих характеристик и проанализировать влияние параметров и особенностей совместной работы мостового инвертора и электродвигателя на характер электромагнитных процессов, протекающих в системе. Энергетические показатели ВДПМ, и в частности КПД, определяются как потерями в электрической машине, так и потерями в ком- мутаторе. Поскольку питание обмоток двигателя импульсное, то для анализа влияния частоты коммутации ШИМ на уровень пульсационных потерь в обмотках необходимо рассчитать реальную кривую тока в двигателе. Это, кроме того, позволит оценить уровень динамических потерь в коммутаторе и тем самым получить рекомендации по выбору частоты коммутации ШИМ из условия минимума суммарных потерь. В работе [19] ВДПМ рассмотрен как импульсная система с неизменными параметрами непрерывной части и переменными параметрами импульсного элемента. При этом полупроводниковые ключи коммутатора полагаются безынерционными, а параметры силовой цепи двигателя, включающие в себя параметры фаз обмоток ВДПМ и сопротивление Х,(п) [-\ элементов преобразователя, входя- ~\иэ I I . 1 щих в состав цепи нагрузки, на от- у, (л; ДПР ь О е] Дельных коммутационных интервалах остаются неизменными. Функционалньая схема одной из фаз ВДПМ как импульсной системы Рис. 3.6. ВДПМ как им- представлена на рис. 3.6, где ИЭ - пульсная система с перемен- импульсный элемент с переменными ными параметрами параметрами; %\(n), yi ( )- соответст- венно законы амплитудной и широтно-импульсной модуляции; ч [п, е] -ток в фазе двигателя; НЧ- непрерывная часть, параметры которой включают в себя параметры силовой цепи; п-текущее значение номера импульса напряжения ШИМ; e - tH/T--относительная длительность импульса питающего напряжения; Т-период частоты коммутации ШИМ. Поскольку метод теории импульсных систем предполагает воздействие на непрерывную часть импульсов, образованных двумя разнополярными скачками напряжения, то синусоидальную ЭДС заменим ступенчатой кривой. При этом в пределах каждого периода частоты коммутации ШИМ полагаем ЭДС постоянной и равной ее среднему значению за период Т. При отношении частоты коммутации к частоте основной гармоники ЭДС F/Fi 10...12 такая аппроксимация дает незначительную погрешность (менее 2%) в определении амплитуды первой гармоники ЭДС по отношению к амплитуде реальной ЭДС, наводимой в фазе двигателя. Закон амплитудной модуляции %\{а) в этом случае имеет вид U sign (sin cora) - е [га], t3 < е < у + h\ ,П,Г1 (3.15) -e[n], /3 + Y<e<l+f3, где й=о)/7; e[n]-среднее значение ЭДС вращения на га-м периоде напряжения ШИМ; h = t3/T - относительное время задержки, вводимое в закон переключения транзисторов мостового инвертора с целью предотвращения сквозных tokoj при коммутации. Выражение для закона широтно-импульсной модуляции yi{n) находится из совместного решения уравнений, описывающих огибающую выходного сигнала ДПР и пилообразное напряжение генератора пилообразных импульсов, использующегося для формирования напряжения ШИМ по заданному закону. Для наиболее распространенных форм выходного сигнала ДПР выражение для yi(ra) имеет вид [20]: для синусоидального сигнала (n\- Q coscT) (га + I) - sin a(w-f 1)] . , jg, 1 Qu cos w (n + 1) - sign [ sin (re - 1)] * для трапецеидального с длиной линейно возрастающего (убывающего) участка сс, в электрических радианах й1 п<га+1<(/г1 + -) п; Yi( ) = { Q. (*, + -)nn<n+ 1 <{*, + !--£-) л,; (3.17) а + 1 для прямоугольного с длительностью управляющего импульса (я 2а0 в электрических радианах Yi( ) = ) о, Мп< +1 <(*1 + 1г)пп; ; q, +-5-)+ (*. + !-?-) .; <ЗЛ8> 0, (£, + 1---)п„<п+1<(*1 + 1)Пп, число периодов а, , Г + 1 ,) я где а = ; , = Ь i--1 >; пп = -~ напряжения ШИМ в полупериоде ЭДС вращения. Полагая Q = 1 в выражении (3.18), получим математическое описание выходного сигнала ДПР для ВД с дискретной коммутацией, что даст возможность использовать рассматриваемый метод применительно к анализу вентильных двигателей с дискретной коммутацией и сравнить их с ВДПМ по энергетическим показателям. Реакция непрерывной части на единичный скачок запишется в виде A <F) = /С (1 -e~v), где р = 7УГ,; Г, = L/r; ~t = t/T; K=l/r. Полагая 7 = га + e, запишем импульсную характеристику непрерывной части, т. е. реакцию непрерывной части на последо- |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |