 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [ 26 ] 27 28 29 30 31 0,1 мм). Обмотка каждого дросселя содержит 400 витков. В пазах пакета статора 2 уложена четырехсекционная (четырехфаз-ная) распределенная обмотка, выполненная аналогично многофазным обмоткам синхронных или асинхронных машин. Принципиальная электрическая схема коммутатора К.ДБ60-10-4, входящего в комплект двигателя, приведена на рис. 7.2. Секции LI - L4 якорной обмотки двигателя, сдвинутые между собой на 90° эл., коммутируются полупроводниковыми ключами А7 - А10. Каждый ключ выполнен в виде интегральной микросхемы, представляющей собой составной транзистор, зашунтиро-ванный в обратном направлении диодом (на рис. 7.2 для простоты ключи А7 - А10 изображены однотранзисторными, а не двухтранзисторными, соответствующими реальному устройству). Управление полупроводниковыми ключами осуществляется попарно в противофазе при помощи разнополярных сигналов, вырабатываемых двумя однополупериодными усилителями-демодуляторами. Усилители-демодуляторы собраны на транзисторной сборке А4 и диодных сборках А5, А6. Питание транзисторов усилителей-демодуляторов осуществляется прямоугольными опорными напряжениями, поступающими с обмоток трансформатора Т2 маломощного магнитотранзисторного мультивибратора (МТМ) через диодные выпрямительные мосты А5, А6. МТМ собран на транзисторной сборке А1. Управляющее напряжение поступает на входы транзисторов усилителей-демодуляторов с выходных обмоток трансформаторов ТЗ и Т4. Первичные обмотки этих трансформаторов соединены по мостовой схеме с обмотками индуктивных чувствительных элементов ДПР (дроссели насыщения LI - L4). Переменное напряжение с частотой 10 кГц, использующееся для питания чувствительных элементов ДПР, поступает с обмоток трансформатора 12 через резистор R10 (R11), диодный выпрямительный мост А2 (A3) и эмиттерно-коллекторный переход одного из транзисторов VT5 или VT6 (в зависимости от того, какой из них открыт в рассматриваемый момент времени). Постоянное напряжение (+27 В) подается на схему двигателя при помощи бесконтактной магнитополупроводниковой схемы, собранной на транзисторах VT1 - VT4, диодах VD2-VD4, VD8 и токовом трансформаторе 77. Схема коммутатора защищена от питающего напряжения обратной полярности, имеющей место при неправильном подключении шин источника питания, при помощи диода VD1. При подаче на вход коммутатора напряжения питания 27 В (шины -27 В, +27 В) режим работы двигателя будет определяться видом поступающих на него управляющих команд: Вправо , Влево , Торможение . Команда Вправо обеспечивает вращение ротора двигателя по часовой стрелке (если смотреть на двигатель со стороны выходного вала), а команда Влево - против часовой стрелки. 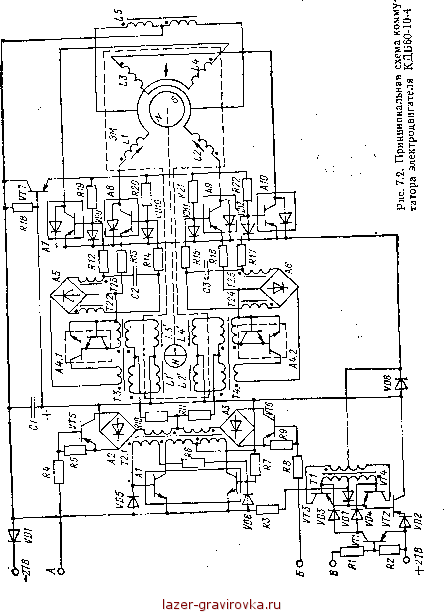 7 Зак. 976 Команда Торможение обеспечивает отключение элементов коммутатора от питающей сети и автоматический перевод двигателя в режим динамического торможения. Следует заметить, что при эксплуатации электродвигателей не допускается одновременная подача на коммутатор любых двух команд, так как это может привести к выходу его из строя. При снятой команде Торможение транзистор VT1 находится в запертом состоянии, что создает условия для возбуждения автоколебаний в магнитотранзисторном ключе, собранном на транзисторах VT3, VT4и трансформаторе 77. Транзисторы VT3 и VT4 начинают переключаться в противофазе, обеспечивая протекание тока по цепи: +27 В, диод VD2, эмиттерно-базовый переход транзистора VT2, эмиттерно-коллекторный переход открытого в данный момент транзистора VT3 (или VT4), первичная полуобмотка трансформатора Т1 (верхняя или нижняя на рис. 7.2), средняя точка первичной обмотки трансформатора Т2. Одновременно происходит подключение МТМ к шинам питания и насыщение транзистора VT2, подключающего шину +27 В к эмиттерам полупроводниковых ключей А7 - А10. МТМ начинает генерировать разнополярные прямоугольные напряжения, изменяющиеся с частотой 10 кГц, для питания чувствительных элементов ДПР (LV - L4) и фазочувствительных усилителей-демодуляторов с обмоток Т2.2-72.5 трансформатора Т2. При поступлении на коммутатор команды Вправо (постоянное напряжение -27 В в точке А относительно шины +27 В) открывается транзистор VT5 и подает напряжение с верхней полуобмотки трансформатора Т2 через выпрямительный мост на чувствительные элементы ДПР. В зависимости от положения ротора двигателя относительно статора сигнальный элемент (постоянный магнит) ДПР вызывает насыщение по одному дросселю в каждой паре чувствительных элементов, включенных в плечи моста. На выходных обмотках трансформаторов ТЗ, Т4 появляются при этом переменные напряжения, которые поступают на входы усилителей-демодуляторов (базо-эмиттерные переходы транзисторов сборок А4.1, А4.2). Под действием этих напряжений на выходах усилителей-демодуляторов (конденсаторы С2, СЗ) появляются напряжения, полярность которых зависит от величины сдвига по фазе (0 или 180°) между входными и опорными напряжениями на обмотках Т2.2-Т2.5 трансформатора Т2. В свою очередь, фаза входных напряжений зависит от того, какой чувствительный элемент в каждой паре дросселей LI, L3 и L2, L4 насыщен в данный момент сигнальным элементом ДПР. Таким образом, полярность напряжений на выходах демодуляторов определяется в конечном итоге положением сигнального элемента ДПР относительно его чувствительных элементов, т. е. положением ротора двигателя относительно статора. Выходные напряжения усилителей-демодуляторов поступают на базы пар полупроводниковых ключей А7, А8 и А9, А10, коммутирующих секции якорной обмотки, сдвинутые между собой на 180° эл. Вследствие этого при определенной полярности напряжений на выходах усилителей-демодуляторов один из ключей в каждой паре будет насыщен, а другой заперт. Это обусловит протекание тока по соответствующим секциям якорной обмотки и создание электромагнитного момента в двигателе. При вращении ротора ВД сигнальный элемент ДПР поочередно насыщает то один, то другой чувствительный элемент (дроссель насыщения) в каждой паре. В момент изменения состояния дросселей происходит изменение фазы напряжения на 180° на входах демодуляторов и соответствующее изменение полярности напряжений на их выходах. При этом ранее открытый полупроводниковый ключ в каждой паре запирается, а закрытый- отпирается, отключая одни секции якорной обмотки от источника питания и подключая к нему другие. Таким образом обеспечивается знакопостоянство электромагнитного момента ВД и устойчивая его работа. При снятии с коммутатора команды Вправо и подаче на него команды Влево (постоянное напряжение -27 В в точке Б относительно шины +27 В) закрывается транзистор VT5 и открывается VT6, подавая на чувствительный элемент ДПР напряжение с нижней полуобмотки трансформатора Т2, фаза которого сдвинута по отношению к фазе напряжения, действующего на верхней полуобмотке, на 180°. При этом происходит соответствующее изменение фазы напряжений на входах усилителей-демодуляторов и, как следствие, изменение полярности напряжений на их выходах. Очередность коммутации полупроводниковых ключей и секций якорной обмотки изменяется на противоположную, что вызывает режим торможения противовклю-чением и реверс двигателя. При поступлении на коммутатор команды Торможение в виде постоянного напряжения -27 В, прикладываемого к точке В относительно шины +27 В, открывается транзистор VT1. Он своим насыщенным коллекторно-эмиттерным переходом и открытыми диодами VD3, VD4 шунтирует вход магнитополупро-водникового ключа (базо-эмиттерные переходы транзисторов VT2- VT4) и обмотку трансформатора 77, подключенную к базам транзисторов VT3, VT4. При этом нарушаются условия возбуждения автоколебаний в магнитополупроводниковом ключе и выходной его транзистор VT2 переходит в режим отсечки, снимая напряжение питания 27 В с элементов коммутатора (с маг-нитотранзисторного мультивибратора и полупроводниковых ключей А7 - А10). Ток, потребляемый электродвигателем от источника питания, снижается до нуля. Вследствие этого падение напряжения на диоде VD8, ранее запиравшее транзистор VT7, также уменьшается до нуля. Под действием ЭДС секций LI - L4 транзистор VT7 открывается, соединяя общую точку резисторов R19- R22 с общими точками секций якорной обмотки. Это обусловливает одновременное протекание токов под действием 9ДС секций по эмиттерно-базовым переходам полупроводниковых ключей А7 - А10, переводящих их в режим насыщения. При этом по контурам, образованным насыщенными ключами А7- А10 и секциями якорной обмотки, под действием ЭДС вращения потекут токи. Индуктивное сопротивление секций якорной обмотки ВД с возбуждением от постоянных магнитов значительно меньше их активного сопротивления, поэтому вектор МДС якорной обмотки будет практически перпендикулярен вектору магнитной индукции поля индуктора, что обеспечит максимальный тормозной электромагнитный момент и соответственно эффективное динамическое торможение двигателя. Для обеспечения наибольшей эффективности динамического торможения рассматриваемого двигателя необходимо так выбрать сопротивление резисторов R19 - R22, находящихся в цепях баз силовых транзисторов Л7 - А10, чтобы напряжение к э между их коллекторами и эмиттерами было как можно меньше при протекании по секциям якорной обмотки токов iK, обусловленных ЭДС вращения es. Для оценки влияния сопротивления резисторов R19 - R22 на напряжение к-э достаточно проанализировать в один полупериод изменения ЭДС процессы в двух секциях двигателя, сдвинутых между собой в пространстве на 180° эл. (рис. 7.3, а). Эквивалентная схема, соответствующая двухсек- 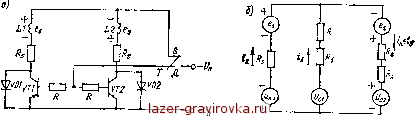 Рис. 7.3. К анализу электромагнитных процессов за полупериод изменения ЭДС вращения: а - принципиальная схема двигателя; б - эквивалентная схема ционному двигателю, изображена на рис. 7.3, б. Прн ее составлении принято допущение, что резистор R отключается от базы транзистора VT2 прн полярности ЭДС es, показанной на рис. 7.3, а. Принятое допущение не вносит значительных погрешностей в конечные результаты анализа, так как при указанной полярности ЭДС ток секций протекает через диод VD2, шунтирующий инверсно включенный транзистор VT2, и последний поэтому практически исключается из работы. Для эквивалентной схемы справедлива следующая система уравнений! к = бР; es = бРЯ* ~ к-э + 1>о, + к (Я + Re) = 0; (7 1} 2es - t6$Rs - ик э - U02 ~ 1б (Р + 1) (Rs + Яд) - 0; es - it (R + Яд) - I/oi - Voi - 6 (P + 1) (R. + Яд) = 0, я,ы тпянзистооа VT1: es, Rs - соответственно мгновенное зна-ГД 1 ЭДС и сопротивлениеСекции якорной обмотки; 6 - коэффициент уси-чение ЭЛЬ и сопротивление лци v f/n, - пороговые напряжения тения по току транзисторов VT1, VI г, Uoi, U<>2 ииршивые а * соответственно7 на переходе база - эмиттер транзисторов VT1, VT2 и диодах VD1 VD2- Rn, Яе - соответственно сопротивления диодов VD1, VD2 в проводящем направлении и базо-эмиттерного перехода транзисторов VT1, VT2. Решая уравнения системы (7.1), находим 16-- Яб + Я + (6+ 1)(Я* + Яд) к э == es + c/0i - (р„ - Цп, - Um) (РЯз - Яб - Я) (7.2) t < Т+ЯёГ+№ + +Яд) (7.3)
0,8 В Из выражения (7.3) следует, что напряжение ик-э на открытом транзисторе VT1 (VT2) зависит от сопротивления резистора R и от пороговых напряжений иа транзисторах и диодах. Кривые зависимости ик-э = /(о), построенные по выражению (7.3) при 3 = = 1000; Яб=Ю Ом; Яд = 2 Ом; Rs = = 20 Ом, es = const; Я = 0; U0l = U02 = U0, представлены на рис. 7.4, откуда следует, что величина U0 значительно влияет на . ик э. Приведенные кривые являются предельными, поскольку R = 0. При R=£ 0 величина , будет еще больше, чем показанная на рис. 7.4. 0,4- 0,6 Рис. 7.4. Зависимость ик-э = = f(Uo) для различных значений мгновенной ЭДС вращения 7.2. Электромеханический привод с двухконтурной системой регупирования частоты вращения на основе ВД с изменяемой структурой типа ДБ 120-8 Электропривод предназначен для работы в составе мотор-колес транспортных роботов, а также для приведения в действие регулирующих органов систем управления автономных ро- ботов. Основные технические данные электропривода следую-, щие: Напряжение питания, В....................31 Номинальная частота вращения, об/мин............ 8000 Диапазон регулирования частоты вращения..........10 Номинальная мощность при напряжении питания 27 В, Вт . . , 120 Пусковой ток, А не более...................34 Номинальный ток, А, не более................6,5 Коэффицент полезного действия в номинальном режиме работы, %...........................70 Масса электрической машины со стояночным электромагнитным тормозом и кабелем, кг, не более...............3 Масса блока управления с контактором коммутации, с источником питания и релейной системой дистанционного управления, кг, не более.......................3 Двигатель допускает реверс с частоты вращения в режиме холостого хода. |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |