 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [ 25 ] 26 27 28 29 30 31 10. Проверка устойчивости индуктора к размагничивающему действию реакции якоря. Уточнение размеров индуктора. Строим кривую размагничивания материала КСП-37 в относительных единицах (рис. 6.12), используя ее аналитическое выражение v-(2Vv-0* где у = 0,294; h = Н/Нс - текущее значение относительной напряженности магнитного поля; Яс = 520 000 А/м; Ь - В/Вг; В - индукция, определяемая по кривой размагничивания; В, =. = 0,85 Тл; Н - напряженность магнитного поля. Одним из известных способов (например, по таблице в работе [7, с. 65]) находим значение относительной магнитной проводимости рассеяния индуктора на пару полюсов, где go - абсолютное значение проводимости рассеяния; £м - длина магнита на пару полюсов; QM - сечение магнита на пару полюсов (площадь полюса). По таблице [7, с. 65] находим для к = 1; р = 2 g0 = 2- 10-s Гн/м. Так как индукция рассеяния определяется выражением
Щ 0,1 о Рис. 6.12. Диаграмма состояния постоянного магнита индуктора В =g Н, Я„ *° В, i= 1.22А. На рис. 6.12 проводим из начала координат луч проводимости рассеяния под углом % = arctc47=515°- По таблице [7, с. 65] находим относительное значение проводимости рассеяния индуктора (на пару полюсов) для случая стабилизации магнита воздухом (индуктор находится вне машины без охранного кольца): а св зсв Q -ii = 3.10-6 Гн/м. По выражению h = 1.83А на рис. 6.12 проводим из начала координат луч проводимости рассеяния &асв = /(Л) под углом <хсв = arctg gcc3 -ф- =62°. г Через точку пересечения прямой bacB = f (h) с кривой размагничивания Ai проводим прямую возврата под углом В к оси абсцисс (для материала Определяем угол а0, под которым проводится луч, соответствующий внешней проводимости индуктора на пару полюсов, из выражения tgaQ = где tg а + tg а , & пл 1 О . л е . tg апл - пл n d ЛП7= Лв-г Л' + Л + Л - полезная проводимость индуктора на пару полюсов; А6 = тХаи0/(26) - при ненасыщенной магнитной цепи машины; А6 = = Aj = 0; Ag = 0,13ц0 Dp при ап = 1. По известным значениям La, Dp, р, ц0 = 4я-10-7 Гн/м находим AnjI = 3,08- Ю~7 Гн; Тогда tga0 = 7,734 + 1,22 = 8,954 и а0 = 83,6°. Под углом a0 к оси абсцисс на рис. 6.12 из начала координат проводим луч внешней проводимости. Точка Ал его пересечения с прямой возврата определяет среднее значение индукции в нейтральном сечении магнита в номинальном режиме работы двигателя. Отрезок, соединяющий точки А2 и В2, определяет индукцию йеной в зазоре машины в номинальном режиме работы: ном = 0,75; В(, ном= = £бноМВЛ = 0,64 Тл. Находим положение рабочей точки двигателя на прямой возврата во время действия реакции якоря. Наибольшая размагничивающая реакция якоря действует при положении магнита индуктора относительно секции якорной обмотки, показанном на рис. 6.13. Это положение соответствует моменту подключения секции L1 к источнику питания. Точками и крестиками на рис. 6.13 обозначено направление тока в секциях якорной обмотки (секции условно изображены одновитковыми). При указанном на рис. 6.13 направлении токов в секциях результирующий вектор МДС статора Farn будет направлен под углом ср = я/2 -f aK/2 к магнитной оси индуктора. Для рассматриваемого четырехсекционного двигателя ак = я/2. Тогда ф = 135° и максимальная размагничивающая МДС якоря, приходящаяся на пару полюсов, определится выражением 1 л/2~ Fp. я т = - I F*m cos ф = Fnm I 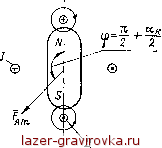 Рис. 6.13. К расчету размагничивающей реакции якоря Так как МДС F*m в четырехсекционном ВД создается двумя секциями якорной обмотки, сдвинутыми между собой на угол я/2, то F ят - 2F 5 i cos = V2 Fs где Fsm - максимальное значение МДС одной секции якорной обмотки. Тогда Fр. я т ~ ~Г FSm ~ kw WsIpS где Ifs - значение тока в секции во время реверса двигателя, 147/ С учетом действия поперечной реакции якоря последнее выражение за пишем в виде Pp. я т = ~ kwslps ( 1 + 0,2 ctg -у-). Для рассчитанных значений ws lps - /к max найдем Fp. m = 0,5 -334 -3,95- 1,2 = 791,6 А. Относительное значение реакции якоря р. я т LuHn 791,6 0,69- 10~2 520 ООО = 0,22. Откладываем отрезок, равный hp. ят, на оси абсцисс (рис. 6.12). С конца отрезка hp. ям проводим перпендикуляр до пересечения с лучом проводимости рассеяния (точка Si). Параллельно лучу внешней проводимости через точку Bt проводим луч до пересечения с прямой возврата в точке Л3. Точка А3 определяет положение рабочей точки на прямой возврата при действии максимальной размагничивающей реакции якоря hp. ят-Из рис. 6.12 следует, что точка А3 находится на достаточно большом расстоянии от точки Аи что гарантирует стабильную работу машины во всех условиях эксплуатации, и поэтому отпадает необходимость в выполнении повторных расчетов, уточняющих размеры индуктора и параметры якорной обмотки. Если точка А3 после предварительных расчетов располагается левее точки А\, то для уменьшения реакции якоря необходимо при повторных расчетах несколько увеличить % (длину ротора) с тем, чтобы увеличить магнитный поток индуктора и соответственно уменьшить ws. Если же точка А3 после предварительных расчетов располагается значительно правее точки Ait то необходимо уменьшить плотность тока в обмотке якоря и тем самым увеличить сечение ее провода. При этом уменьшатся диаметр и объем индуктора, увеличится ws и возрастет hp. ят. Точка, Аз переместится ближе к оптимальному положению. 11. Расчет основных размеров магнитопровода и корпуса электрической машины. Чертеж листа железа магнитопровода показан на рис. 6.14. Определяем номинальный магнитный поток в воздушном зазоре машины на пару полюсов с учетом данных материалов КСП-37: 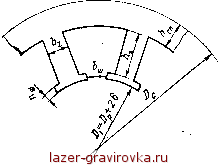 Рис. 6.14. Конфигурация листа железа магнитопровода статора Ф : 66 homSA - °>75 °.85 1.681 Ю-4 = 1,072 10~4 Вб. Находим высоту паза: = 0,32Dp = 0,32 1,54 10~2 = 0,5 10~* м. Число пазов в магнитопроводв Zc = 2p/7i<7 = 2-2-2. 1 =8. Число проводников в пазах iVn = ==lli 334 =334) где S - число секций якорной обмотки. Находим площадь паза: Qn = SMSN /k3. п = 0,026 334/0,3 = 29 lO 6 м2, где k3. п = 0,3 ... 0,35 - коэффициент заполнения паза. Принимаем индукцию в стали якоря согласно работе [7] равной 5С = (1,0... 1,05) £с„= 1,1 Тл, где ВСп - индукция в спинке якоря: Всп = Вс = 1,1 Тл. Так как Вс - (В2 + Вс )/2, где Вг - индукция в зубце, то Вг = 2Вс - 5Сп= 1,1 Тл. Ширина зубца статора одинакова по его высоте и определяется по формуле 2рФ6ном 2-2- 1,072- Ю-4 Ьг = LaZSA = 1,54-Ю-2-8-1,1-0,9 = 0,35 10 М где La - Dp - длина пакета статора; kc - 0,9 - коэффициент заполнения пакета сталью. Высота спинки статора Ф. 1,072 - Ю-4 Псп ~ 2BcnLakc 2 - 1,1 - 1,54 - Ю-2 0,9 0,dS) Ш М Высота и ширина шлица паза: hm = (0,35 ... 0,7) Ю-3 м 0,5 10~3 м; bm = d H-(0,5.. .1) Ю-3 м = 0,22 10-3+0,78 . 10~3 = 1 10~3м. Высоту зубцов статора hz найдем из равенства QnZ = я (Z>p + 26 + - Zbjn) А где hz = hm + Ы (рис. 6.14). Подставляя значения Qn, Z, Dp, б и 6г, получим h\ + 0,7 10-2/г2 - 0,74 Ю-4 = 0. Решение уравнения дает значение hz = 0,6-Ю-2 м. Диаметр магнитопровода машины Dc равен £>с = Ор + 26 + 2АШ + 2hcn + 2hz = = 1,542 10-2 + 0,08 Ю-2 + 0.1 10-2 + 0,7 10~2 + 1,2 10~2 = 3,62 10~2 if. После расчета массы основных узлов ВД и электромеханической постоянной времени производится тепловой расчет по известной методике [7]. Глава 7 ПРАКТИЧЕСКИЕ СХЕМЫ И КОНСТРУКЦИИ ДВИГАТЕЛЕЙ 7.1. ВД следящего привода робота с релейным законом управления Для автономных роботов, использующихся для выполнения заданных операций в местах, недоступных человеку, одной из важнейших является навигационная система, обеспечивающая устойчивую связь робота с оператором и оперативный обмен информацией между ними. Связь с оператором и центральной системой управления осуществляется с помощью радиопередатчика [58]. Для автономных роботов она оказывается значительно более помехоустойчивой по сравнению с проводными системами передачи информации. Важнейшими требованиями, предъявляемыми к следящим электроприводам таких роботов, являются высокие экономичность и быстродействие, малые масса и габариты, высокая надежность и большой ресурс работы. Выполнить эти требования можно, используя в качестве приводных вентильные электродвигатели. При этом, поскольку угол поля устойчивой связи робота и оператора, как правило, достаточно большой, то для повышения экономичности привода целесообразно обеспечить релейный режим его работы. При движении робота по заданной траектории должно быть достигнуто в каждой ее точке совпадение угла захвата приемопередающей антенны робота с углом излучения антенны оператора путем поворота антенны робота следящим приводом. В релейном режиме электропривод обесточен в течение времени, когда угол рассогласования между осями антенн меньше допустимого. При достижении углом рассогласования граничного значения на привод подается соответствующий сигнал, и он разворачивает антенну робота против направления движения. После отработки заданного рассогласования привод переходит в режим динамического торможения. Ниже описан вентильный двигатель ДБ60-10-4, предназначенный для привода навигационной системы автономного робота. Электродвигатели ДБ60-10-4 имеют раздельное исполнение электрической машины и коммутатора, которые соединяются между собой кабелем. Технические данные электродвигателя следующие: Напряжение питания, В................. Номинальная мощность на валу, Вт...........10 Номинальный вращающий момент, Н-м......... 0,0239 Номинальная частота вращения, об/мин......... 4000 ± 400 Номинальный потребляемый ток, А........... Пусковой момент, Н-м........... ..... Частота вращения в режиме холостого хода, об/мин . . . 5200 ± 400 Масса электрической машины, кг.............045 Масса коммутатора, кг................. Срок службы, годы................... ВД допускает режим переключения с последующим реверсом с максимальной частоты вращения. Коммутатор содержит узлы, которые по сигналам системы управления обеспечивают пуск, реверс и динамическое торможение электродвигателя. На рис. 7.1 представлена конструктивная схема электромашинной части ВД, состоящей из корпуса 1, статора 2, ротора 9, 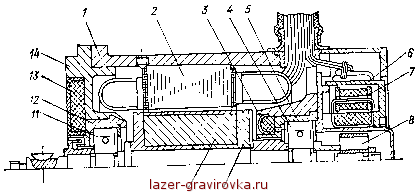 10 9 Рис. 7.1. Конструктивная схема электродвигателя ДБ60-10-4 статора ДПР 6 и подшипникового щита 14. В щит 14 и корпус 1 запрессованы втулки 5 и 12, в которых имеются гнезда для шарикоподшипников 4 и 11. Для увеличения ресурса работы двигателя в корпусе 1 и щите 14 размещены подпиточные узлы 3 и 13, из которых смазка в процессе эксплуатации поступает в подшипники. На роторе 9 установлены цилиндрический четырех-полюсиый постоянный магнит 10 индуктора, намагниченный радиально, и два магнита 8 сигнального элемента ДПР, намагниченные в осевом направлении. Магниты индуктора и ДПР изготовлены из высококоэрцитивного сплава КСП-37 (SmCo5), обеспечивающего наибольшую удельную энергию магнитного поля в воздушном зазоре и, как следствие, минимальные габариты и массу машины при заданной мощности. На статоре 6 ДПР установлены четыре индуктивных чувствительных элемента 7, представляющих собой дроссели насыщения с замкнутым магнитопроводом, навитым из ленточного пермаллоя 50 НП (два витка ленты шириной 2 мм и толщиной |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |