 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 [ 23 ] 24 25 26 27 28 29 30 31 (рис. 6.8). Поэтому целесообразно выбирать магнитопровод с сечением, несколько большим оптимального, что позволит уменьшить необходимое число витков wA, активное сопротивление обмотки дросселя и упростить технологию его изготовления. 6.4. Особенности проектирования ВДПМ Объем постоянного магнита индуктора ВД, который в основном определяет массогабаритные показатели электродвигателя, определяется, как известно, исходя из максимальной продольно-размагничивающей реакции якоря либо из условия стабилизации магнитных свойств постоянного магнита воздухом . В отличие от ВД с дискретными преобразователями, где в пределах одного оборота вала реакция якоря меняется от продольно-размагничивающей до продольно-намагничивающей, в ВД с позиционной модуляцией фазных напряжений по синусоидальному \d зак0НУ ПРИ нейтральной Ч установке ДПР продоль-ная реакция якоря при пуске отсутствует, поскольку вектор МДС обмоток якоря с поворотом ротора всегда находится под углом 90° эл. по отношению к вектору индукции поля постоянного магнита индуктора. В ВД, предназначенных для роботов, должен быть обеспечен режим реверса с какой-то отличной от нуля частоты вращения вала электродвигателя. В этом случае возникает продольно-размагничивающая реакция якоря, которая может быть значительной. Ее неучет при расчете объема постоянного магнита приведет к сползанию рабочей точки на диаграмме магнита с прямой возврата и в конечном счете-к изменению рабочих характеристик двигателя. Поскольку ток в фазах ВД с позиционной модуляцией практически синусоидальный, то для анализа режима реверса целесообразно воспользоваться методом двух реакций [17]. Обратимся к векторной диаграмме на рис. 6.9, построенной для случая нейтральной установки ДПР, т. е. для реверсивного ВД. Согласно принятому направлению вращения ток 1 в фазе будет отставать от приложенного напряжения U на угол ср, определяемый параметрами фазы обмотки: 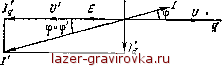 Рис. 6.9. Векторная диаграмма ВДГЩ в режиме реверса Ф = arctg где L, т - индуктивность и активное сопротивление фазы соответственно; Q - угловая частота вращения вала двигателя. ЭДС вращения Е находится в противофазе с приложенными напряжением. В момент реверса приложенное напряжение меняется по фазе на 180° эл. и становится равным V. Если считать, что частота вращения вала двигателя некоторое время остается близкой к частоте реверса и направление вращения также сохраняется, то в фазе обмотки ВД начинает протекать ток отстающий от напряжения U на тот же угол о/ = <р. Такое допущение правомерно, поскольку в электроприводах роботов, как правило, электромагнитная постоянная времени существенно меньше электромеханической ввиду наличия инерционной нагрузки и поэтому переходный процесс успевает закончиться без существенного снижения частоты вращения вала. Поскольку ЭДС вращения Е теперь складывается с напряжением U, ток реверса / может достигать больших значений. В работе [56] с использованием метода двух реакций получено в относительных единицах выражение для расчета продольно-размагничивающей составляющей тока реверса, которое имеет вид Ч = ! + (1)2 Wxr + У1 + (v)2 sin ф]. Если реверс производится с частоты вращения в режиме холостого хода, т. е. v = 1, то U = Tlbf + sin <6-47> Это выражение дает возможность определить значение хг, при котором размагничивающее действие реакции якоря будет максимальным. Взяв производную didJdxr и приравняв ее нулю, получим хг=\. Подставив это значение хг в выражение (6.47), получим, что размагничивающая составляющая тока реакции якоря при реверсе с частоты вращения в режиме холостого хода становится равной пусковому току. Таким образом, при определении объема постоянного магнита индуктора значение размагничивающей составляющей тока якоря ВД следует находить по формуле (6.47). При проектировании ВД с позиционной модуляцией фазных напряжений необходимо также правильно выбрать частоту коммутации ШИМ, от которой зависят как энергетические показатели привода, так и пульсации электромагнитного момента при регулировании частоты вращения. Гармонический состав тока в двигателе будет определяться параметрами его обмоток и соотношением частоты коммутации ШИМ и частоты вращения вала. Увеличение частоты коммутации уменьшает пульсации тока, но приводит к увеличению динамических потерь на переключе- ние силовых транзисторов коммутатора. Наряду с этим наличие временных задержек при коммутации транзисторных стоек мостового усилителя мощности при малых сигналах управления приводит к появлению в кривой фазного тока высших гармоник, а следовательно, к пульсациям электромагнитного момента в пределах одного оборота вала. Как показано в третьей главе, на амплитуду пульсаций влияет соотношение времени задержки и периода тактовой частоты. Таким образом, в основе выбора частоты коммутации ШИМ должны лежать два критерия: получение наилучших энергетических характеристик и обеспечение малых пульсаций мгновенной частоты вращения при малых сигналах управления. При расчете ВДПМ для конкретных значений параметров силовой цепи и транзисторов коммутатора с использованием кривых kr)(Fn) и kp(F ) определяется КПД. При этом расчет двигателя можно вести по первой гармонике приложенного напряжения. Действительно, электромагнитный КПД Лэм = Рэм/(Рп + Р, С учетом выражений для расчета рп и рпер, полученных в третьей главе, запишем эмп эмт] oft После тождественных преобразований получим т,9м =--- (6.48) Здесь у]эы - электромагнитный КПД вентильного двигателя, фа-8Ы которого питаются от источника синусоидального напряжения. Так как коэффициент kp с увеличением частоты коммутации растет более резко, нежели коэффициент /г„, то найдется такое значение Fnm, при котором ВД будет иметь максимальный КПД при заданной частоте вращения. Тогда частота коммутации ШИМ определится по формуле F= Юбаз vF 2я пт Расчеты коэффициентов kp и kn, проведенные в диапазоне относительных частот вращения, где ВД имеет максимум КПД на естественной механической характеристике, позволили определить рекомендуемые значения Fnm для различных значений параметров силовой цепи двигателя, которые сведены в табл. 6.3.
С увеличением относительной частоты вращения превалирующую роль в определении Fnm играют потери в меди от высших гармоник тока, поскольку потери на переключения уменьшаются с уменьшением абсолютного значения тока в двигателе. Сужение диапазона изменения F m с увеличением 6j обусловлено увеличением амплитуды пульсаций тока ввиду уменьшения индуктивного сопротивления фазы по сравнению с активным. Окончательный выбор частоты коммутации следует произвести с учетом требования минимума пульсаций мгновенной частоты вращения при регулировании уменьшением сигнала управления. Как показывает анализ зависимости Л о (?3), необходимо обеспечить условие ?3 0,02. Если данное условие не удовлетворяется при учете рекомендаций табл. 6.3, то целесообразно предусмотреть возможность регулирования частоты коммутации в сторону ее уменьшения при малых (Q 0,3) сигналах управления. ВДПМ представляет собой синхронный, чаще всего двухфазный, электродвигатель с возбуждением от постоянных магнитов с коммутатором, выполненным по мостовой схеме с раздельным питанием фаз и работающим в режиме класса Д . Поэтому при расчете параметров обмоток и магнитной цепи двигателя могут использоваться методики расчета синхронных машин с учетом рассмотренных выше особенностей, обусловленных спецификой электромагнитных процессов. В связи с этим мы здесь ограничимся лишь изложением последовательности (схемы) расчета ВД с позиционной модуляцией. В качестве исходных данных для расчета обычно задаются следующие величины: напряжение питания, номинальная мощность, номинальная частота вращения, частота вращения, с которой производится реверс направления вращения вала. Кроме того, в техническом задании могут дополнительно оговариваться требования: по нелинейности механической характеристики; по кратности пускового момента по отношению к номинальному; по степени неравномерности вращения вала двигателя; по кратности регулирования частоты вращения; по КПД в номинальном режиме. Расчет ВДПМ, как правило, начинается с определения объема постоянного магнита индуктора [9] i.M а у Д п dPBrffe с учетом выбранного материала магнита и конструкции ротора. Выбор кои- 6 Зак. 976 струкции ротора и числа пар полюсов осуществляется с учетом рекомендаций, изложенных в § 6.2. Последовательность расчета остальных параметров ВДПМ и его характеристик следующая: 1. Исходя из заданного отношения длины магнита индуктора к его диаметру X определяется диаметр магнита. 2. Производится расчет магнитной цепи, в результате которого определяется ряд геометрических размеров листа статора (толщина спинки магни-топровода, ориентировочная толщина зубца). Величина воздушного зазора определяется из условия получения оптимальной проводимости магнитной цепи по рекомендациям, приведенным в работе [9]. 3. Выбирается схема обмотки. Как правило, в ВДПМ применяются распределенные двухслойные обмотки с укороченным шагом. Число витков в фазе обмотки определяется из условия равенства ЭДС вращения при частоте вращения в режиме холостого хода напряжению питания, а активное сопротивление фазы - по заданному пусковому моменту. 4. Рассчитывается геометрия листа пакета статора. Поскольку конфигурация статора ВД аналогична конфигурации статора асинхронного управляемого двигателя, то расчет площади паза и других размеров листа статора может быть произведен по формулам, приведенным в работе (57]. 5. Расчет рабочих характеристик ВД ведется по формулам (3.1) -(3.7). Входящие в выражения для расчета параметры обмоток (активное и индуктивное сопротивления) рассчитываются по известным выражениям [57]. По относительному значению индуктивного сопротивления фазы оценивается нелинейность механической характеристики. Если степень нелинейности не удовлетворяет требованиям технического задания, следует уменьшить индуктивность фазы обмотки (увеличить раскрытие паза, уменьшить воздушный зазор в двигателе) или изменить материал постоянного магнита индуктора, выбрав материал с большим значением максимальной магнитной энергии с целью увеличения потока в двигателе и соответствующего уменьшения числа витков в фазе. Кроме того, проверяется правильность выбора точки на диаграмме постоянного магнита по величине размагничивающей реакции якоря в режиме реверса. Если магнит не выдерживает реверса, то производится корректировка объема постоянного магнита. Расчет КПД электродвигателя ведется по формуле (6.48) с учетом потерь в силовых ключах коммутатора после выбора частоты коммутации ШИМ. Коэффициенты кр и определяются по кривым, приведенным на рис. 3.7 н 3.9. 6. Тепловой расчет ВД не отличается от теплового расчета электрических машин малой мощности с неподвижным якорем [57]. Если в техническом задании на проектирование ВД, кроме того, стоит задача получения постоянства механической мощности на валу электродвигателя, то расчет листа пакета статора (п. 3) ведется для режима работы электродвигателя на нижней ветви гиперболической механической характеристики. Далее исходя из заданного диапазона частот вращения, в котором должен быть реализован режим постоянной мощности на валу, рассчитывается в соответствии с рекомендациями, приведенными в главе четвертой, число витков в фазе для режима работы ВД на верхней ветви механической характеристики. Параметры силовой цепи ВД при расчете рабочих характеристик определяются по выражениям (4.6) с учетом формы огибающей выходного сигнала, вырабатываемого датчиком положения в функции угла поворота ротора. 6.5. Пример проектирования управляемого четырехсекционного ВД с вольтодобавочным дросселем При заданных номинальной мощности, моменте нагрузки на валу и частоте вращения расчет четырехсекционного ВД с воль тодобавочным дросселем целесообразно выполнять в такой по следовательности: 1. На основании анализа технического задания на проектирование выбирается наиболее рациональная структура силовой части ВД и устройства управления. 2. Определяется напряжение питания электрической машины. 3. Определяется оптимальное значение пускового момента двигателя, обеспечивающее его работу в номинальном режиме с максимальным КПД. 4. Определяется частота вращения в режиме идеального холостого хода и строится естественная механическая характеристика ВД. 5. Определяются коэффициент СЕ, пусковой ток, сопротивление цепи секций якорной обмотки. 6. Выбираются параметры индуктора и якорной обмотки из условия обеспечения максимального быстродействия ВД. 7. Выбираются типы силовых транзисторов и диодов коммутатора и устройства управления. 8. Производится расчет вольтодобавочного дросселя. 9. Определяются основные параметры обмотки якоря и индуктора (в первом приближении). 10. Уточняются размеры индуктора из условия его устойчивости к размагничивающему действию реакции якоря. 11. Производится расчет основных размеров магнитопровода и корпуса электрической машины. 12. Определяются масса основных узлов двигателя, момент инерции его ротора и электромеханическая постоянная времени. 13. Производится тепловой расчет двигателя. 1. Выбор структуры силовой части ВД и устройства управления. Основные требования технического задания на проектирование ВД следующие: Напряжение питания ВД U = 27~t\. Номинальная частота вращения 4000 об/мин (418,66 с-1). Номинальная мощность Р„ом = 10 Вт. Номинальный пусковой момент Мп = 0,0885 Н-м. Номинальный вращающий момент М„ом = 0,0239 Н-м. Пусковой ток / - не более 4 А во всех условиях эксплуатации. Материал магнита индуктора - КСП-37 (SmCo5). Двигатель должен допускать реверс с частоты вращения в режиме холостого хода и обеспечивать высокоэффективное динамическое торможение. Температура окружающей среды гт = -5 ... +40 °С. Выполнение двигателя - закрытое. Режим работы - продолжительный. В результате анализа схемно-технических решений ВД с учетом заданных условий работы выбрана принципиальная электрическая схема силовой части двигателя и коммутатора, изображенная на рис. 6.10. Диоды VD1 - VD3 обеспечивают развязку цепей основного и резервного каналов электропривода. При помощи транзистора VT1 производятся подключение, отключение и динамическое торможение ВД. Транзисторы VT2 - VT5 переключаются попарно в противофазе по сигналам ДПР и коммутируют секции LI - L4 якорной обмоткой с источником питания. Дроссель 7.0 обеспечивает близкую к прямоугольной форме суммарную ЭДС в цепях секций якорной обмотки ВД (суммарная ЭДС состоит из ЭДС вращения якорной обмотки и ЭДС дросселя Lo) и вырабатывает ЭДС воль- |
||||||||||||||||||||||||||||||
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |