 |
(495)510-98-15
|
|
Меню
|
Главная » Комплексная автоматизация производства 1 [ 2 ] 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 при фиксированном токе якоря, поскольку обеспечивается взаимная ортогональность векторов магнитной индукции полюсов и МДС якоря. Кроме того, электродвигатели постоянного тока обладают линейными механическими и регулировочными характеристиками при управлении по цепи якоря, что обеспечивает большой диапазон регулирования частоты вращения и причем сравнительно простыми способами. Наряду с положительными свойствами электродвигатели постоянного тока имеют ряд недостатков, связанных с наличием щеточно-коллекторного узла. Срок службы у серийных машин при эксплуатации в нормальных условиях составляет 100- 3000 ч (двигатели серий ДПР и ДПМ) в зависимости от частоты вращения, плотности тока под щетками и применяемых материалов. Электродвигатели постоянного тока имеют низкую надежность ввиду высокой интенсивности отказов щеточно-коллекторного узла, являющегося, кроме того, источником радио- и акустических помех, а также пыли. Из изложенного следует, что решить проблему существенного повышения ресурса двигателей постоянного тока возможно только заменой щеточно-коллекторного узла бесконтактным устройством, выполняющим его функции. Развитие силовой полупроводниковой техники позволило решить эту задачу и привело к созданию бесконтактных (вентильных) двигателей (ВД) постоянного тока. Появление материалов для постоянных магнитов с высокой магнитной энергией (например, на основе редкоземельных элементов) уже на сегодняшний день позволяет создавать электрические машины, которые в 5-7 раз превосходят по удельным характеристикам аналогичные машины недавнего прошлого, а применение электродвигателей с магнитами на основе редкоземельных элементов дает возможность создать электромеханические приводы, соизмеримые по всем основным показателям с гидравлическими и пневматическими приводами [1]. Появление в настоящее время материалов на основе соединения неодим - железо - бор, которые по удельным энергетическим показателям и термостойкости превосходят все известные ранее, в том числе и постоянные магниты на основе редкоземельных элементов самария и кобальта, дает основание говорить о перспективности создания и широкого применения ВД в приводах роботов. При разработке ВД для приводов роботов необходимо учесть, что основными требованиями к ним являются: высокое быстродействие; повышенная перегрузочная способность по моменту нагрузки; широкий диапазон регулирования частоты вращения; обеспечение многократных режимов пуска, реверса, торможения; в ряде случаев эксплуатация в условиях стопорного режима на протяжении определенного времени; высокая надежность и срок службы; высокие энергетические характеристики; при малых частотах вращения отсутствие пульсаций развиваемого момента. Для электромеханических приводов, использующихся в очув-ствленных роботах, необходимо иметь возможность изменения жесткости механической характеристики, режимов работы и развиваемого усилия в функции параметров, характеризующих информацию об окружающей среде. В приводах же с программным управлением обычно требуется обеспечить большую жесткость механической характеристики, чтобы ослабить влияние внешних возмущающих факторов. Вентильные электродвигатели благодаря наличию полупроводникового коммутатора и рациональной организации процессов преобразования энергии могут удовлетворять перечисленным требованиям при обеспечении высоких энергетических показателей привода. 1.2. Функциональная схема и принцип работы ВД Вентильный электродвигатель постоянного тока (рис. 1.1, о) представляет собой электромеханическую систему, состоящую из трех взаимосвязанных узлов: электрической машины (ЭМ), предназначенной для приведения в действие исполнительного механизма (ИМ), датчика положения ротора (ДПР) и коммутатора (К). Конструктивно ЭМ выполняется по типу синхронной машины. Секции Ы-L4 якорной обмотки ЭМ размещаются на статоре. Индуктор машины - постоянный магнит - является основной частью ее ротора и создает в воздушном зазоре поток возбуждения. ДПР состоит из сигнального элемента (СЭ), жестко соединенного с ротором ЭМ, чувствительных элементов (ЧЭ), установленных неподвижно в обойме на статоре машины, и преобразующих устройств (ПУ). Число ЧЭ в ДПР обычно равно числу секций якорной обмотки машины. В ряде случаев благодаря особым схематическим решениям удается уменьшить число ЧЭ и тем самым упростить ДПР и повысить надежность всей системы. Конструктивное выполнение ДПР и его сопряжение с узлами ЭМ показаны на рис. 1.1,6. СЭ размещается в зоне установки чувствительных элементов н при вращении ротора ВД периодически бесконтактно воздействует на них энергией своего физического поля (магнитного, светового, электрического - в зависимости от физической природы используемых ЧЭ и СЭ). Продолжительность этого воздействия определяется значением угла сигнального сектора рс, так как на его протяжении существует физическое поле, воздействующее иа ЧЭ. В миогополюсных ВД геометрический размер сигнального сектора уменьшается пропорционально числу пар полюсов машин. В результате воздействия поля СЭ на чувствительные элементы изменяются их параметры, и на выходе ДПР появляются электрические сигналы ил (рис. 1.1, а), полярность и амплитуда которых зависят от углового положения ротора. Эти сигналы используются для управления коммутатором ВД. Коммутатор по сигналам u (wt), поступающим на управляющие входы его полупроводниковых ключей (ПК), обычно транзисторных, периодически подключает секции якорной обмотки ЭМ к источнику питания (коммутирует секции обмотки). Из-за жесткой связи сигнального элемента ДПР с ротором, а ЧЭ - со статором ЭМ коммутация секций происходит в такой последовательности н в такие моменты времени, при которых направление тока в проводниках секций, размещенных в зоне одной полярности магнитного поля индуктора, сохраняется неизменным при любом положении ротора относительно статора. Именно поэтому в машине при взаимодействии МДС 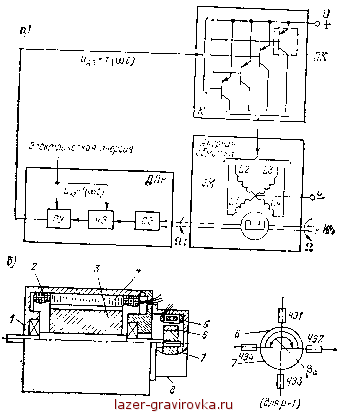 Рис. 1.1. К пояснению принципа работы ВД Жь/ь.! °эблМе°мТеКнат; TTVi - магнитопровод; 5 -мент; -обойма ДПР сигнальный сектор; 7 - сигнальный эле- симую от углового положения ротора относительно статора коммутацию секций якорной обмотки. Следствием этого является практическая идентичность механических свойств ВД и коллекторных двигателей постоянного тока, 1.3. Пути повышения энергетических показателей ВД Многообразие известных схем коммутаторов позволяет представить более подробную, чем в § 1.2, функциональную схему ВД, обобщающую все методы ее построения (рис. 1.2). Из схемы видно, что электрическая энергия источника питания по пути преобразования в механическую, потребляемую на- грузкой ВД, проходит последовательно через два устройства: полупроводниковые ключи (ПК) коммутатора и электрическую машину (ЭМ). ПК, как правило, выполняются на транзисторных структурах, число, тип и способ включения которых определяются мощностью и условиями эксплуатации ВД. Для обеспечения режима отсечки отключаемых транзисторов в широком температурном диапазоне на их входы подаются запирающие напряжения от устройства запирания (УЗ), которое питается от магнитотранзисторного мультивибратора (МТМ) или нагрузке 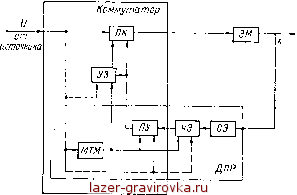 Рис. 1.2. Функциональная схема ВД от источника постоянного напряжения. Управление запиранием ПК может осуществляться сигналами ДПР, как это показано на схеме штриховыми линиями [2]. Для уменьшения динамических потерь в коммутаторе включение и выключение ПК должны производиться импульсами прямоугольной формы [3]. Выходные сигналы применяемых в ДПР чувствительных элементов (датчики ЭДС Холла, индуктивные ЧЭ) имеют синусоидальную или трапецеидальную форму и низкую крутизну фронтов. Кроме того, амплитудно-модулированные сигналы переменного тока индуктивных ЧЭ могут эффективно управлять транзисторами полупроводниковых ключей только после преобразования выпрямительными устройствами. По отмеченным причинам сигналы чувствительных элементов ДПР поступают в преобразующие устройства (выпрямители, усилители-выпрямители, усилители-ограничители), которые формируют однопо-лярные или двухполярные импульсы практически прямоугольной формы для управления полупроводниковыми ключами. Так как элементы преобразующих устройств (диоды, транзисторы, полупроводниковые реле) обладают существенно нелинейными вольт-амперными характеристиками, то импульсы на их выходах могут появляться после достижения амплитудой сигналов ЧЭ порогового значения, при котором ток (напряжение) на выходе преобразующего устройства начинает изменяться. С учетом этого обстоятельства угол сигнального сектора рс ДПР vt соответствующая ему длительность включенного и выключенного состояния ПК будут определяться как угловым размером сигнального элемента СЭ, укрепленного на роторе ЭМ, так а значением порогового напряжения преобразующего устройства (ПУ). Питание ЧЭ и ПУ датчика положения может осуществляться от МТМ или от основного источника постоянного напряжения (на рис. 1.2 показано штриховыми линиями). Все вышеизложенное позволяет сделать ряд выводов: все схемы ВД независимо от типа чувствительных элементов ДПР и якорной обмотки имеют ряд общих элементов: бесконтактную электрическую машину, полупроводниковые ключи и элементы позиционной обратной связи по положению ротора [4]; все схемы известных ВД характеризуются наличием преобразователей сигналов чувствительных элементов ДПР, предназначенных для придания этим сигналам свойств, необходимых для осуществления режима переключения транзисторных ключей, коммутирующих токи в секциях якорной обмотки двигателя; структура силовой части коммутатора и возможности ВД как элемента электропривода определяются выбранным методом организации процессов преобразования энергии, т. е. способом управления коммутацией рабочих токов в секциях якорной обмотки. В настоящее время известны три способа управления коммутацией: способ управления коммутацией, основанный на использовании гальваномагнитных ДПР, чувствительных к направлению магнитного поля сигнального элемента,- датчиков ЭДС Холла. При этом способе разнополярные сигналы датчиков Холла трапецеидальной формы после усиления в преобразующем устройстве поступают на входы ПК, управляющих токами в двух секциях, сдвинутых между собой на 180° эл.; амплитудный способ, при котором амплитудно-модулирован-ные сигналы оптических, индуктивных или гальваномагнитных чувствительных элементов, не реагирующих на направление магнитного поля СЭ, после преобразования в преобразующем устройстве ДПР поступают на входы ПК коммутатора, выполненного в виде многоканального (л-фазного) переключателя [4, 5]; способ управления коммутацией, основанный на позиционной модуляции фазных напряжений по синусоидальному закону посредством широтно-импульсной модуляции сигналов ДПР. Анализ современных разработок, выполненных с использованием перечисленных способов управления коммутацией, выявляет в большинстве случаев сравнительно низкое значение КПД вентильных двигателей, большую конструктивную сложность их коммутаторов и низкое значение удельной мощности (особенно при попытках увеличения КПД). Несмотря на многочисленность работ по вентильным электродвигателям постоянного тока, до настоящего времени остаются еще окончательно не сформулированными и слабоизучен-ными направления повышения их энергетических показателей. Кроме того, в известных работах обнаруживается противоречивость и однобокость в выборе этих направлений. В то время как одни авторы совершенствование ВД связывают с методами формирования особых (оптимальных) законов изменения индукции в зазоре машины [6, 7], другие -с методами формирования особых (оптимальных) законов изменения напряжения или тока секций якорной обмотки электронным коммутатором, работающим в режиме Д [8]. К настоящему времени наиболее полно исследована машинная часть ВД - электрическая машина [4, 7]. Законы управления коммутацией токов, оказывающие существенное влияние на основные показатели ВД (КПД, удельная мощность), практически не исследованы. Очевидно, что повышение энергетических показателей ВД возможно только при комплексном подходе в исследованиях этого класса электродвигателей, учитывающем особенности бесконтактной машины, электронного коммутатора и требования, предъявляемые к робототехническим системам. В работах [5, 6, 9J показано, что повышение энергетических характеристик электрической машины должно осуществляться путем снижения уровня гармонических составляющих в кривой ЭДС вращения е(а) на интервале коммутации ак, так как при этом уменьшаются пульсации тока, а следовательно, и потери мощности в секциях якорной обмотки. При постоянном напряжении питания секций это равносильно выполнению условия для любого текущего значения угла поворота ротора а на участке 0 а ак При произвольной форме напряжения питания секций для достижения наилучших энергетических показателей электриче ской машины необходимо, чтобы частная производная разности напряжения питания и (а) и суммарной ЭДС вращения 1,е(а) секций якорной обмотки, подключенных к источнику питания через открытые полупроводниковые ключи коммутатора, равнялась нулю для 0 ее ак, т. е. д [и (а) - 2е (а)] Q да Выполнение этого условия также благоприятно сказывается на энергетике коммутатора ВД, так как при этом пульсации |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |