 |
(495)510-98-15
|
|
Меню
|
Главная » Трансформаторы в электрических машинах 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 [ 25 ] 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 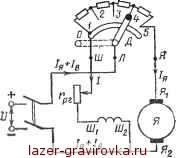 б) пусковым моментом МпуСк, характеризуемым отношением Мпуск/аом., в) плавностью пусковой операции; г) временем пуска в ход пуСк; д) экономичностью операции, определяемой стоимостью пусковой аппаратуры. В начальный момент пуска двигателя его якорь неподвижен, противо-з.д.с. в обмотке якоря равна нулю и ток в якоре двигател 1я = исЩя. Сопротивление цепи якоря невелико, поэтому пусковой ток превышает номинальный в 20 и более раз. Резкий скачок тока при пуске создает на валу двигателя большой пусковой момент, который может вызвать механические разрушения как самого двигателя, так и исполнительного механизма, привести к резкому падению напряжения в сети и вызвать интенсивное искрение под щетками. Поэтому при пуске двигателя в ход для ограничения пускового тока применяют пусковые реостаты, включаемые последовательно в цепь якоря (рис. 7.4). По мере увеличения частоты вращения якоря противо-э. д. с. увеличивается, а ток якоря уменьшается, поэтому сопротивление реостата следует уменьшить так, чтобы в конце пуска оно было полностью выведено и чтобы пусковой ток превышал номинальный не более чем в два-три раза. Рабочие характеристики. Под рабочими характеристиками понимают зависимости частоты вращения, вращающего момента и к.п.д. от полезной мощности на валу или от тока якоря п;Ми т]=/(Р2) или f(/H) при U= (/ном=const и номинальном токе возбуждения. Частоту вращения п определяют из уравнения э.д.с. ис=Ея+1яНя = = сепф+/я/?Я) откуда n=(Uc-/я/?я)/(сеФ) Так как L/c=const, то форма частотной характеристики зависит только от падения напряжения InRn и изменения потока Ф. Регулировочные характеристики. Эти характеристики определяют свойства двигателей при регулировании частоты вращения. К ним относятся: а) пределы регулирования, определяемые отношением гсмакс/>гм:; б) экономичность регулирования (первоначальные затраты ка оборудование и последующие эксплуатационные расходы); в) характер регулирования - плавный или ступенчатый; г) простота регулировочной аппаратуры и операций по регулированию частоты вращения. Двигатели постоянного тока обладают многообразными и гибкими регулировочными характеристиками и поэтому являются незаменимыми з установках с широко регулируемой частотой вращения. Рнс. 7.4. Схема включения пускового реостата в цепь двигателя параллельного возбуждения Механические характеристики. Для электропривода производственных механизмов важное значение имеют механические характеристики, представляющие собой зависимость п=ЦМ) при Uc=const и постоянном сопротивлении в цепи якоря (при условии, что регулирование тока в цепи возбуждения двигателя Не производится). § 7.3. Двигатель параллельного возбуждения Для пуска в ход двигателей постоянного тока применяют двух-, трех- и четырехзажимные пусковые реостаты. На рис, 7.4 представлена схема включения трехзажимного пускового реостата для двигателя параллельного возбуждения. Реостат имеет шесть контактов: пять рабочих (/, 2, 3, 4, 5) и один холостой (нулевой 0); три зажима Л, Ш, Я, которые соответственно подключаются к линии, обмотке возбуждения и к якорю. Скользящий контакт реостата переме* щается по неподвижным контактам и контактной дуге Д, благодаря которой обмотка возбуждения оказывается включенной на полное напряжение сети. Регулировочный реостат в цепи возбуждения грг следует вывести, так как в этом случае ток возбуждения /в, магнитный поток Ф и вращающий момент двигателя достигают наибольшей величины, что облегчает пуск двигателя в ход. Пусковой реостат рассчитывают на кратковременный режим работы, когда количество его секций определяется условиями плавности пуска двигателя. Так как в первый момент пуска п=0, то и противо-э. д. с. Ея=0, и /п.тах=с/с/(г?я+2/?п), где Rn - сумма сопротивлений всех секций пускового реостата. Пусковой реостат можно рассчитать так, чтобы при последовательном выключении его секций пусковой ток изменялся в пределах от /птах до /ц-min. В этом случае /п=0,5(/п-шах+/п-ш1п), на рис. 7.5 показана диаграмма реостатного пуска двигателя. После того как с увеличением частоты вращения пусковой ток уменьшится до значения Zn-min, рукоятку реостата переводят на второй контакт, выводя тем самым сопротивление первой секции. Пусковой ток снова возрастает до /п.тах, после чего частота вращения двигателя начнет возрастать по кривой Ь, а ток - уменьшаться по кривой В. В дальнейшем пусковой процесс идет в том же порядке до тех пор, пока 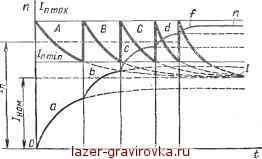 Рис. 7.5. Диаграмма процесса в ход 5 Ступени пуска двигателя 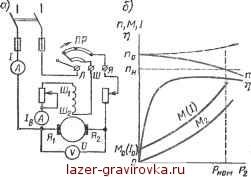 не будетвыведен Еесь реостат, после чего двигатель будет работать в установившемся режиме при токе / и частоте вращения п. Останавливают двигатель быстрым переводом рукоятки пускового реостата в нулевое положение и отключением рубильника Р (рис. 7.4). \ Рабочие'характеристики двигателя. Они имеют вид п; М; rj = = f(/fl) при 0=итм = const и 7=const. Схема двигателя показана на рис. 7.6, а\ реостат в цепи возбуждения грг должен быть отрегулирован так, чтобы двигатель развивал номинальную мощность PH0M при номинальных значениях напряжения Ull0M тока /ном и частоте вращения /гном. В этом положении реостат должен оставаться в неизменном положении. Рабочие характеристики показаны на рис. 7.6, б. Частота вращения якоря n=(U-InRa)l (сеФ); так как, по условию, величины U и /в являются постоянными, то Е этих условиях на частоту вращения двигателя влияют незначительно два факта: падение напряжения в якоре IrRr и реакция якоря. При увеличении тока нагрузки 1Я падение напряжения увеличивается, а частота вращения уменьшается. Одновременно реакция якоря размагничивает двигатель, т. е. приводит к уменьшению магнитного потока главных полюсов и, следовательно, стремится увеличить его частоту вращения. Таким образом, указанные факты оказывают противоположные влияния на частоту вращения якоря и е зависимости от преобладания одного из этих факторов происходит уменьшение или увеличение частоты вращения при нагрузке двигателя. Чтобы работа двигателей параллельного возбуждения была устойчива даже при преобладании реакции якоря, необходимо ставить на главных полюсах стабилизирующую обмотку, которая соединяется последовательно с обмоткой якоря и включается согласно с параллельной обмоткой возбуждения. В этом случае при увеличении тока нагрузки размагничивающее действие реакции якоря компенсируется намагничивающим действием стабилизирующей обмотки. Таким образом, внешняя характеристика двигателя параллельного возбуждения n~f(Ia) имеет вид почти прямой линии, слабо наклоненной к оси абсцисс. Изменение частоты вращения при увеличении нагрузки от нуля до номинальной составляет 2-f-8%. Подобный вид внешней характеристики составляет одно из наиболее отличительных Рис. 7.6. Схема двигателя параллельного возбуждения (а) и его рабочие характеристики (б) |
|
© 2024 ООО "Стрим-Лазер": Лазерная гравировка.
Все права нотариально заверены. Копирование запрещено. |